Masters Student at Binghamton University, State University of New York: Computer Science. Looking for Full-Time Roles in Software Engineering, Autonomous Robotics & Software Testing.
-
Experience
Student researcher conducting research to quantify the experience of programming with knowledge representation and reasoning (KRR) paradigms, such as First-Order Logic, Prolog, PDDL, Answer Set Programming, STRIPS, Situation Calculus, and GOLOG.
-
Projects
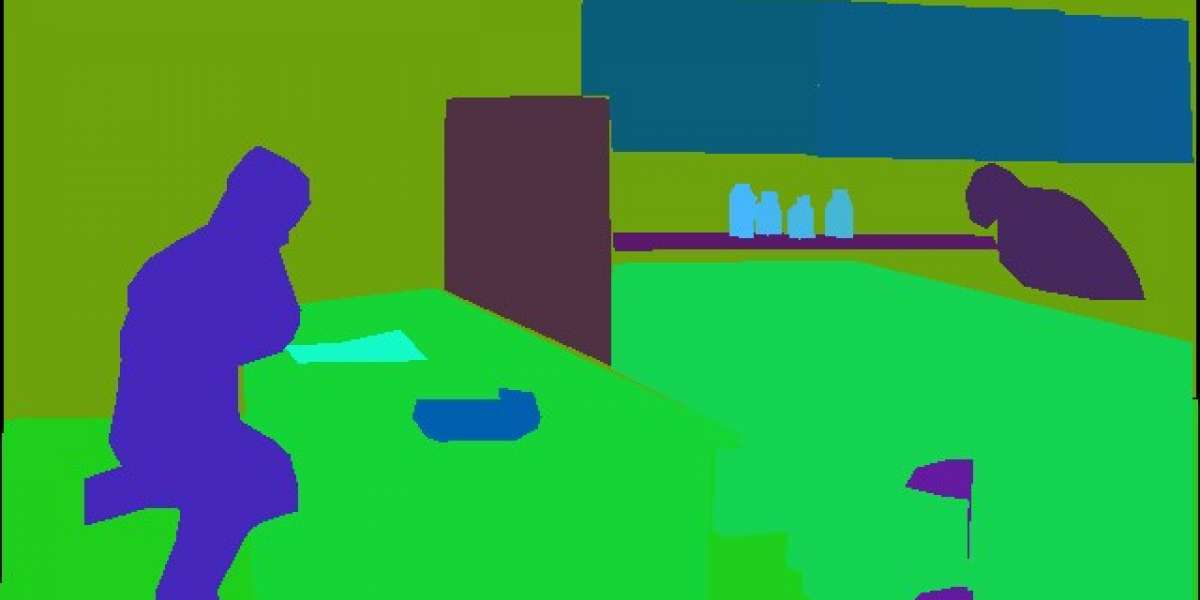
Semantic Segmentation for Indoor Autonomous Driving
• Description: Designed and coded a semantic segmentation software to be integrated with autonomous driving code using Keras and OpenCV. Tested the code on an input video stream from an RGBD camera mounted on a moving robot in an indoor environment. Program successfully differentiates between static and moving objects.
• Optimized the algorithm to run in real time.
Medical Cost Prediction
• Description: • Developed and trained a neural network model that was able to make predictions of medical costs for novel patients. For this purpose, we used an artificial neural network with one hidden layer.
• The choice of ANN gives a 6% increase in R-squared values compared to scikit learn’s decision tree predictor.
Cache Simulator
• Description: Simulated a multi-level cache hierarchy hardware to emulate the hits/misses/evictions of a cache. Tested the code for its performance, area, and energy for different memory hierarchy configurations.
Operating Systems
• Designed and implemented internals of modern operating systems including a priority scheduler to handle multiple threads, an improved memory manager with copy on write functionality, an improved shell to handle multiple shell commands at once and system calls.
• Tested the code for its correctness and integration in xv6 Unix based OS.
Branch Predictor
• Description: Implemented a branch predictor simulator to simulate bimodal, g-share and hybrid branch predictors. Used the program to compare the performance of different configurations of branch predictors.
Twitter Clone
• Description: Developed a twitter clone web application using Flask, SQL Alchemy, and HTML, CSS, and JavaScript.
Speech Recognition
• Description: Developed code for a robot to recognize and follow voice commands. For voice commands CMUSphinx speech recognition system is used and messages are passed using ROS middleware. The robot successfully recognizes and follows voice commands.
Object and Color Recognition
• Developed code for an autonomous robot to detect a red color ball and follow it at a specified distance.
• Used OpenCV to detect the color and shape of the object, depth sensors to calculate the robot's distance to the object, and ROS middleware to pass navigation messages to the robot.
• Performed unit testing, integration testing and system testing on a TurtleBot.
• The robot successfully recognizes and follows a red color ball at 1 meter in real time
Simultaneous Localization and Mapping
• Description: Developed code for a robot to explore and create a map of the environment autonomously. The robot uses a wall following algorith